米元研究室の紹介ページ
3年演習の内容
Python言語の基礎, データ分析, OpenCV, AI(CNN/RL/LLMなど), GIS)
※3年次のゼミでは、主にPython/AIプログラミングの勉強を行います。
Python開発環境としてminicondaを想定します。
※3年次、演習で学べるAIの要素技術は深層強化学習、CNN画像分類、LLM活用です。
※LLM活用... ローカルLLM
4年卒業研究の分野
いわゆる「知能系」のテーマを扱います。
CV... コンピュータビジョン
CG... コンピュータグラフィックス
AI... 人工知能
AR/VR... 拡張現実 / 仮想現実
AP... Webアプリ開発(LLM活用/GIS活用)
GIS... 地理情報システム2025~
画像処理がメインの研究室です。卒業研究はAIが人気です。
シミュレータの開発が多いです。好きなテーマを選べます(要相談)。
VR機材... Meta Quest 3 x2(機材の関係で各学年1名まで。すべて自分の力で開発できる人。後期に判断します)
・関連科目
データ分析演習(旧グラフィックスプログラミング演習)
知能情報システム論(人工知能2027~)
パターン認識と機械学習
最近のゼミ生の研究活動
1. 画像処理系
・3年生(23RS)の学会発表(2026.3月 電子情報通信学会総合大会 in 九産大 ジュニア&学生ポスターセッション特別賞受賞!)選奨発表
頑張ればあなたも・・・
 23RS612, 自転車運転支援のための歩行者の検出と距離推定手法の検討
・4年生の学会発表(2025.3月 電子情報通信学会総合大会 in 東京都市大 ジュニア&学生ポスターセッション) no entry
23RS612, 自転車運転支援のための歩行者の検出と距離推定手法の検討
・4年生の学会発表(2025.3月 電子情報通信学会総合大会 in 東京都市大 ジュニア&学生ポスターセッション) no entry
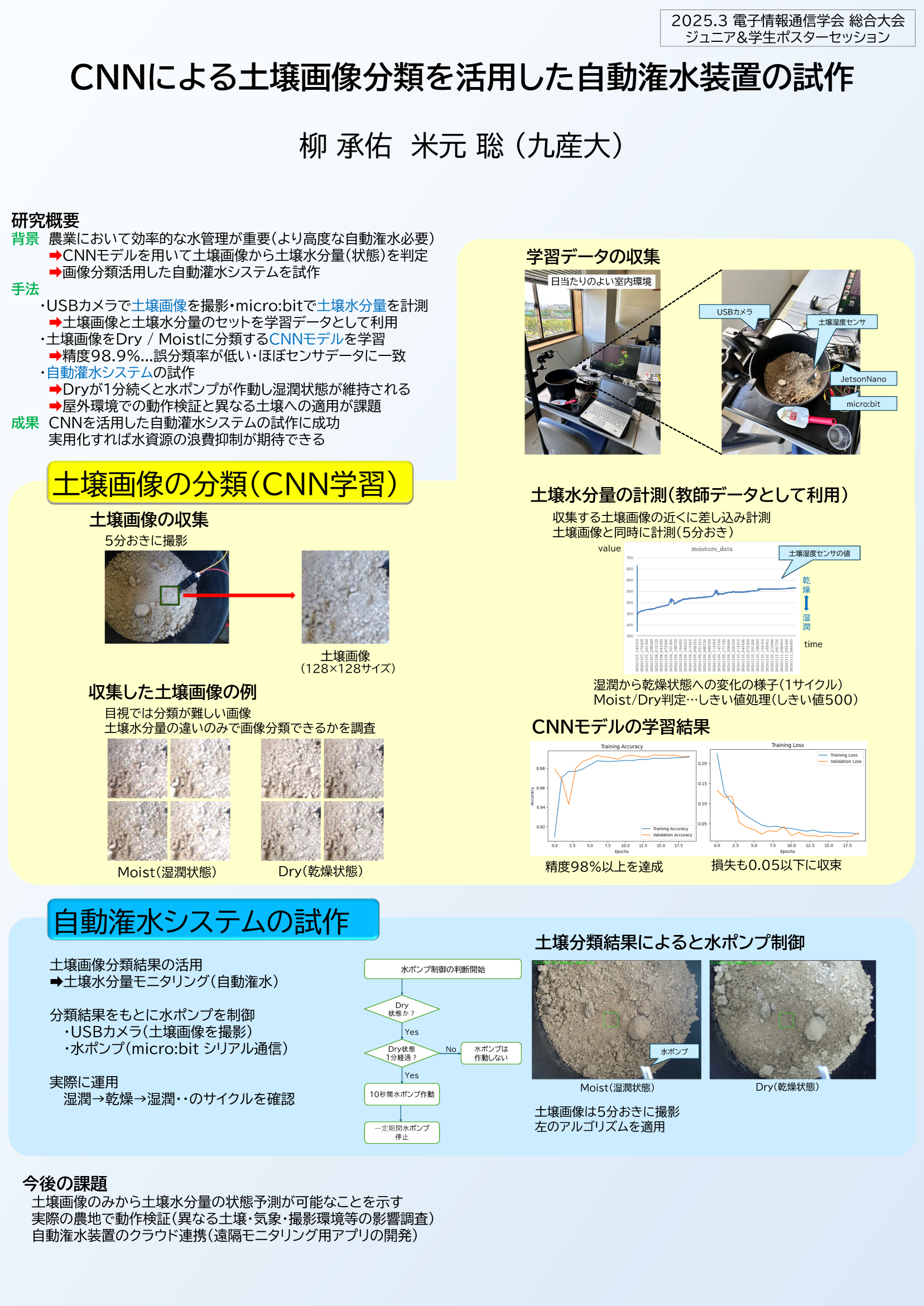 19RS140, CNNによる土壌画像分類を活用した自動潅水装置の試作
19RS140, CNNによる土壌画像分類を活用した自動潅水装置の試作
2. GIS系
・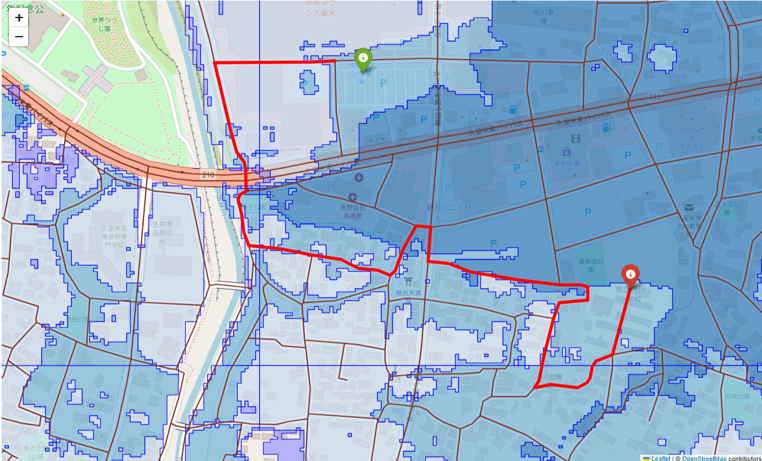 GISの例(災害リスク最小の経路を探索, Webアプリ:久留米地区)
以前から卒業研究で取り組んでいますがまだ未発表の研究です。plateauデータを使います。
GISの例(災害リスク最小の経路を探索, Webアプリ:久留米地区)
以前から卒業研究で取り組んでいますがまだ未発表の研究です。plateauデータを使います。
3. VR系
・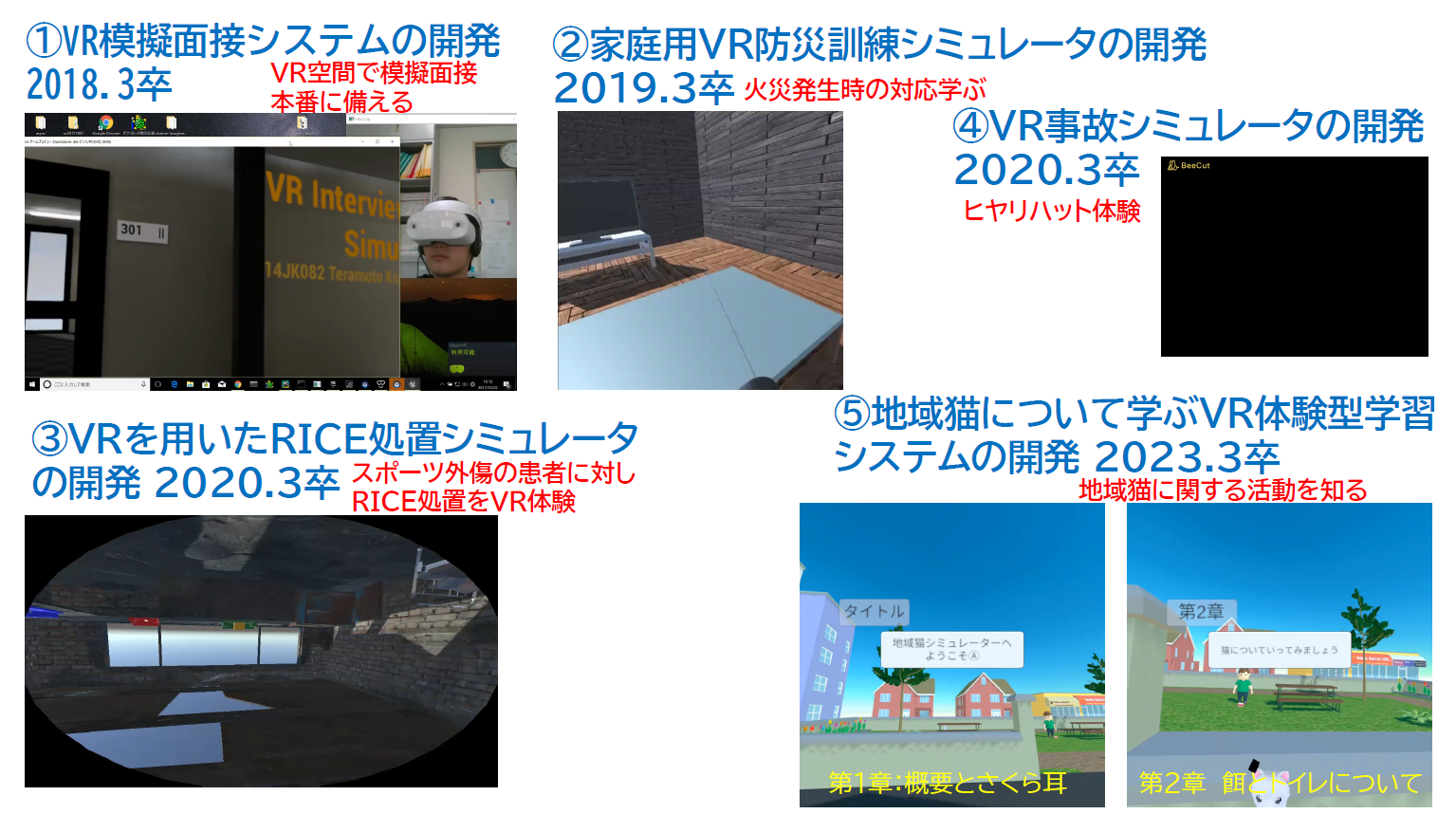 過去のVR作品
過去のVR作品
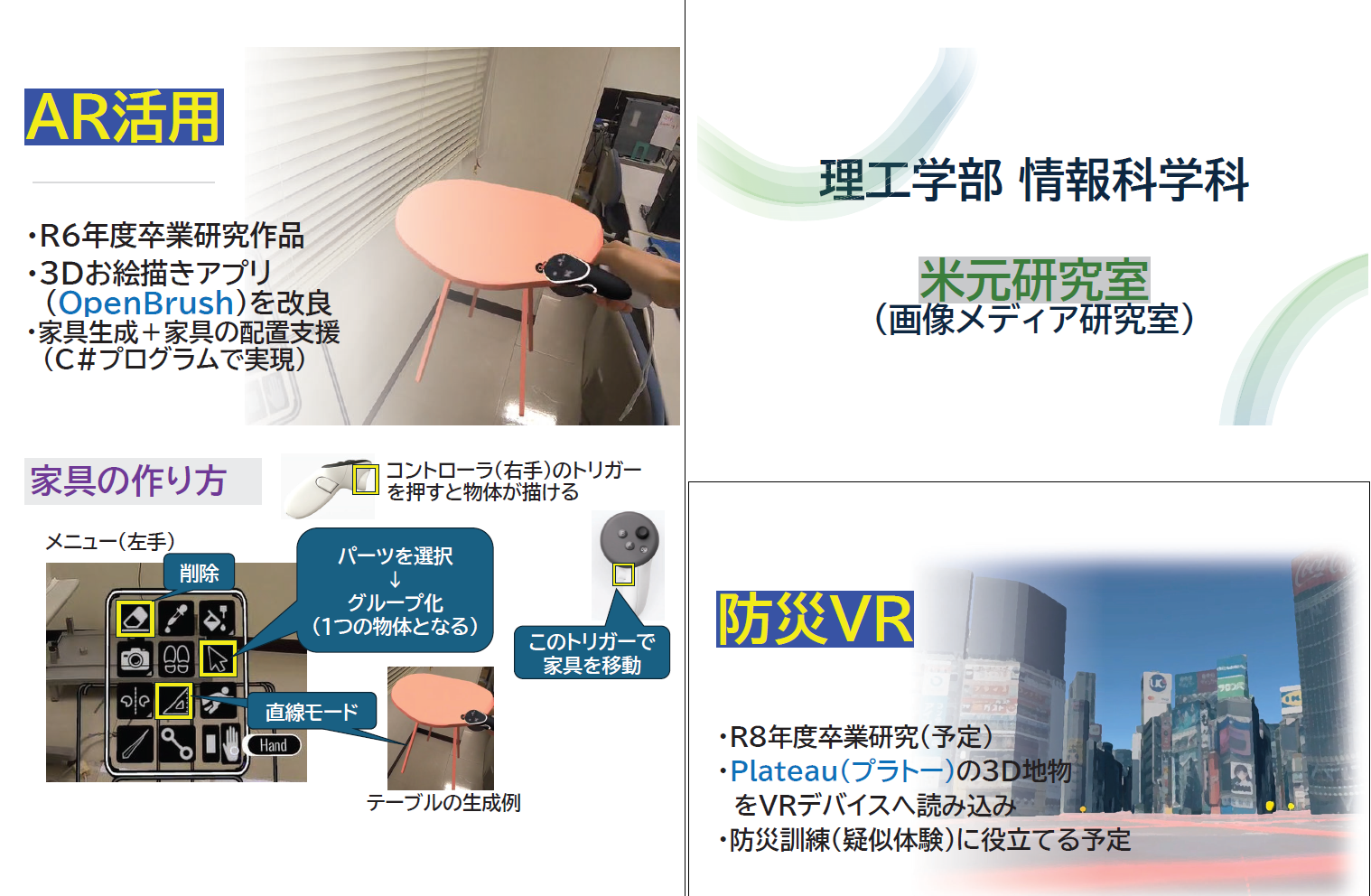 現在取り組んでいるのは、VRものづくり、防災VRです。
現在取り組んでいるのは、VRものづくり、防災VRです。
過去の卒業研究タイトル
以下、直近3年の卒論タイトルを掲載しておきます。
2025年度(22RS)研究テーマ
- 22RS016, Discord Botを用いた土壌水分状態の自動通知機能の実現
- 22RS022, 環境音に着目したテレワーク作業状態判別手法の検討
- 22RS031, サッカーゲームAIにおける対戦が獲得行動に与える影響
- 22RS081, CNNを用いた路面のひび割れ検出
- 22RS089, PLATEAUデータを用いた洪水リスクと避難ルートの可視化
- 22RS118, ペットボトルキャップの有無に基づく自動分別が可能なスマートゴミ箱の試作
- 22RS154, 大規模交通流マルチエージェントシミュレータMATSimを用いた福岡市における時差出勤・テレワークによる交通渋滞緩和効果の分析
- 22RS608, CLIPとLLMを用いた食品画像からのアレルゲン情報提示システムの開発
2024年度(21RS)研究テーマ
- 21RS004, 模倣学習を用いたゲームAIの人間らしい行動の獲得に関する研究
- 21RS006, Room Craft: AR技術を活用した直感的な家具配置支援ツール
- 21RS020, Stable Diffusionで生成した小説挿絵のVR環境における視覚化
- 21RS049, 建物と道路データの結合にもとづく避難経路の生成とQGISによる可視化
- 21RS604, 実データに基づく交通流シミュレータの試作
- 20RS022, OpenAI APIとLangChainを用いたチャットボットの開発
- 20RS099, 運転リスク評価のための認知判断機能測定アプリケーションの開発
- 20RS128, Vision Transformerを用いたりんごの鮮度識別
- 19RS140, CNNによる土壌画像分類を活用した自動灌水システムの開発
2023年度(20RS)研究テーマ
- 20RS026, 複数のLoRAを用いた Stable Diffusionによる画像生成
- 20RS033, ChatGPTとStable Diffusionを用いた吹き出し画像の自動生成
- 20RS102, 日本語版GPT-2を用いた小説生成AIの開発
- 20RS116, YOLOv8を用いた商品読み取りWebアプリケーションの開発
- 20RS144, Unity ML-Agentsを用いた自動運転シミュレータの開発
- 20RS601, LINEを活用したAIチャットボットの実現
- 20RS093, Vision Transformerを用いた野菜画像の分類
- 20RS086, 深層強化学習を用いた掃除ロボットの行動学習